Some of you may recall that I had been working on my V2 motion control system for quite some time now. It took the form of a senior project at my college, and now that I am officially done with all my classes, I feel comfortable sharing some of the shots I recreated.
I used an MPC X-Wing model kit from 1978 and painted it back during my sophmore year. I crudely affixed a clamp at the back due to time constraints. I was only able to book a tiny room on my campus that could comfortably fit just 4.5 meters of track, so I was pretty constrained to what shots I could do.
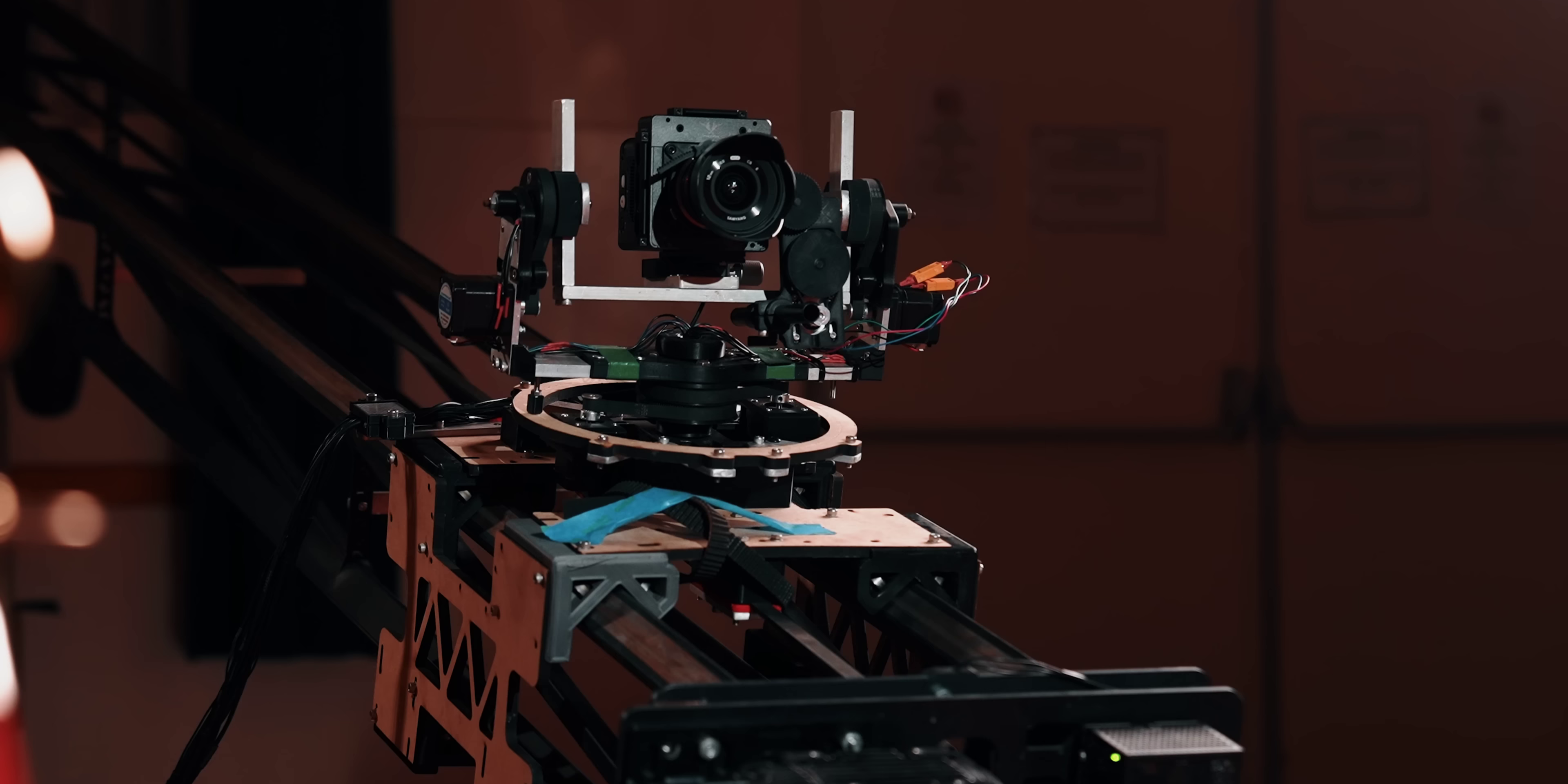
I selected three shots from the Empire Strikes Back, and did my best to capture their motion through Modo. Using a python script, I grabbed each axes keyframe values and exported them as a Kuper file. I wrote a software package that would ingest the Kuper file and send the appropriate signals to my stepper motors for the PT head and model mover.
Two things to note before you watch this video.
1. I poorly lit the bluescreen (utter incompetence on my part)
2. Did not properly rigidify the dolly track (some shots don't line up perfectly)
Despite this, I'm still very happy with the results. I have a much better grasp of the technique and believe the majority of the newly fabricated mechanics, electronics, and software I built reflect my growth as an engineer and amateur filmmaker.
Last note: when I mean "composite," I'm just referring to the fact that I layered all three passes. I still need to learn how to properly composite all the passes with the appropriate elements.