You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Jackieisrockin's IM3 Iron Patriot Pepakura Files! V2 files coming soon!
- Thread starter jackieisrockin
- Start date
zombienoms
Active Member
I saw there was talk of hinge plans and servo mounts for the helmet back on page 60 but I can't find anything more. Did these things ever get posted or figured out?
hell beast
Jr Member
can any one help with the arm missile mechanism ")

Zabana
Well-Known Member
I´m afraid there is no real room for a forearm and the whole missile thing
can any one help with the arm missile mechanism
http://cdn.instructables.com/F20/IQTA/HKPX4Q8M/F20IQTAHKPX4Q8M.MEDIUM.jpg
hell beast
Jr Member
I´m afraid there is no real room for a forearm and the whole missile thing
i think you are right :cry
JouzuMania
New Member
Hello, when i type in another scale for unfolding Pepakura gives me an error saying it can't unfold parts over 2000mm. When i look at the height it is way over 21000 or something. The default also isn't 425.23 it is 0.849.
What did i do wrong?
What did i do wrong?
Last edited:
Hello, when i type in another scale for unfolding Pepakura gives me an error saying it can't unfold parts over 2000mm. When i look at the height it is way over 21000 or something. The default also isn't 425.23 it is 0.849.
What did i do wrong?
The helmet scale is completely separate from the rest of the suit pieces. Default for just about everything else is 425.23, except for the gloves which will have to be found separately.

zombienoms
Active Member
Has anyone tested the cannon using the schematics and servos provided I'm concerned if they're powerful enough for the pan tilt motion
Has anyone tested the cannon using the schematics and servos provided I'm concerned if they're powerful enough for the pan tilt motion
The servos listed were used on a 3d printed version of the cannon, and they worked fine. A pepakura and fiberglass-finished cannon could end up with a lot more weight, then a higher torque servo could be needed (for the tilt function only). The actual cannon section is also happier if it's balanced so that the center of gravity is right over the pivot point. The guy I designed it for just added a little weight to the nose; it just reduces the torque needed a little bit for the servo to flip the cannon up.
zombienoms
Active Member
I was also wondering how you use the swivel hubs and connect them. I see that the swivel hub uses the bearings so things can glide around but I seem them used in wheels and free non-servo motion. Do you attach each hub to an individual side (which i imagine just makes it swing in a circle without control) or do you bind have longer screws going through both hubs in which this would seemingly lock the swivel hub and prevent the ball bearings from rotating making the swivel hub static and unnecessary.
I've been trying to figure out the design of the cannon and while I think I have a rough idea its things like this that I was wondering if you could clarify
I've been trying to figure out the design of the cannon and while I think I have a rough idea its things like this that I was wondering if you could clarify
The swivel hubs are absolutely necessary; they work on each end of the cannon's mounting arm to allow the cannon itself to stay parallel to the ground as the arm it's mounted on rotates away to clear IP's head. It's hard for me to explain, but I'll try. First off, the canon arm has to rotate on it's base so the cannon itself will clear the back of IP's head when it tilts up. If the swivel hubs were not incorporated, the cannon would end up cockeyed, when it needs to stay level even as the arm rotates. The main cannon arm and the control arm next to it are set side-by-side and are identical in length. The main arm is powered by the drive gear to rotate out, while the secondary arm (and its mounting points) are what is forcing the cannon upper assembly to stay level.
Swivel hub in the cannon assembly's base: Lower half is bolted to the base frame. Upper half is bolted to both the main cannon arm and also the main drive gear. That main gear is meshed to the servo gears that drive it, preventing the swivel hub from spinning freely. When the servo gears are powered, they then rotate the main drive drive gear, causing the arm to swing out away from behind IP's head.
Swivel hub under the tilt mount assembly: The lower half is bolted to the other end of the main cannon arm, while the upper half is bolted to the tilt mount assembly. The only thing keeping these pieces from spinning freely is the secondary arm (the purple one below) that runs parallel to the main control arm. This secondary arm is what forces the upper assembly to stay level relative to the lower base assembly, it creates a parallelogram with the main arm and turns the upper hub to compensate for the turning of the lower hub.
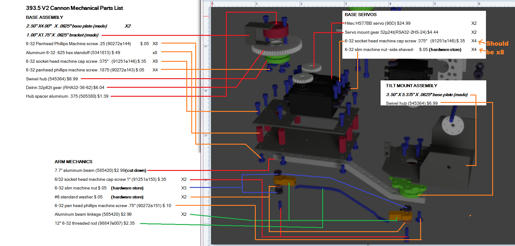
Hope that helps a little at least. It wasn't the most elegant design, but adding a secondary servo to do the same job would have added too much weight up top.
Swivel hub in the cannon assembly's base: Lower half is bolted to the base frame. Upper half is bolted to both the main cannon arm and also the main drive gear. That main gear is meshed to the servo gears that drive it, preventing the swivel hub from spinning freely. When the servo gears are powered, they then rotate the main drive drive gear, causing the arm to swing out away from behind IP's head.
Swivel hub under the tilt mount assembly: The lower half is bolted to the other end of the main cannon arm, while the upper half is bolted to the tilt mount assembly. The only thing keeping these pieces from spinning freely is the secondary arm (the purple one below) that runs parallel to the main control arm. This secondary arm is what forces the upper assembly to stay level relative to the lower base assembly, it creates a parallelogram with the main arm and turns the upper hub to compensate for the turning of the lower hub.

Hope that helps a little at least. It wasn't the most elegant design, but adding a secondary servo to do the same job would have added too much weight up top.
papertiger00
New Member
Is anyone finding issues with the helmet? I seem to find lack of conection points to make it a solid helmet. I understand the face being seperate for opening. thats a good thing. but the back and other spots are one sided on the tabs. so no place to connect the two sections together.
this is referring to the paper pep files. not any of the other designs.
this is referring to the paper pep files. not any of the other designs.
Picard1471
Active Member

BillyOnion
Member
Hey all! First off, this thread is amazing, some damn fine work on all parts!
I'm currently doing an IP build using these files and I'm seriously struggling with the sizing of the cod. I've set the scale up for someone who's 6ft, and everything fits, however the cod seems disproportionately small! Any advice on cos/ab size for a 32" waist?
I'm currently doing an IP build using these files and I'm seriously struggling with the sizing of the cod. I've set the scale up for someone who's 6ft, and everything fits, however the cod seems disproportionately small! Any advice on cos/ab size for a 32" waist?
Hey all! First off, this thread is amazing, some damn fine work on all parts!
I'm currently doing an IP build using these files and I'm seriously struggling with the sizing of the cod. I've set the scale up for someone who's 6ft, and everything fits, however the cod seems disproportionately small! Any advice on cos/ab size for a 32" waist?
What scale are you using for the cod, and then the abs? The cod is fairly small, and you would have to scale up even more if you were building with foam. A cod (for paper and resin) built @ 393 should fit a 32" waist.
BillyOnion
Member
I'm doing a card/foam hybrid build. Fibreglass resined card base with thin eva foam coating it, then treated as foam for finishing.
I've been using about 373 for the whole build and so far its been perfect! I'll give 393 a try when I get in this evening! Cheers man
I've been using about 373 for the whole build and so far its been perfect! I'll give 393 a try when I get in this evening! Cheers man
Molag Bal
New Member
Jackieisrockin: Thanks a ton for making these files I truly appreciate all your hard work! As well as everyone who had a hand in making this a possibility Thank you!
Although im a bit late to the show check out my build thread over on the 405th. http://www.405th.com/f43/iron-patriot-wip-43328/
Although im a bit late to the show check out my build thread over on the 405th. http://www.405th.com/f43/iron-patriot-wip-43328/
Similar threads
- Replies
- 4
- Views
- 1,105
- Replies
- 4
- Views
- 2,488
- Replies
- 1
- Views
- 1,098